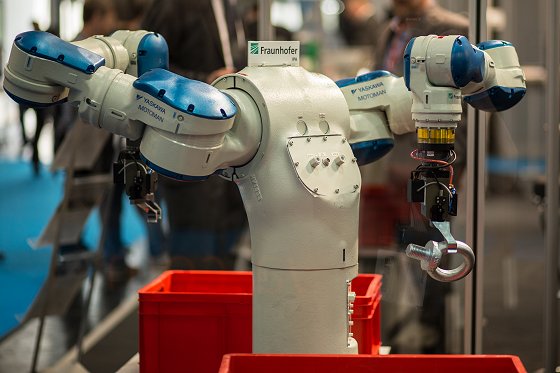
Griff in die Kiste mit Software:
In Fertigungen ist es üblich, Werkstücke in Kisten oder Boxen ungeordnet zu lagern und zu transportieren – das geht schnell und geschieht stündlich millionenfach. Die anschließende automatisierte Entnahme aus der Kiste ist allerdings ein komplexer Vorgang, so dass diese Arbeit vorwiegend manuell durchgeführt wird. Dieser zweiarmige Yaskawa-Roboter findet alle Teile und greift sie sich – dank einer Software vom Fraunhofer IPA. Mit ihr kann der Roboter die Teile in der Kiste lokalisieren; auf die Werkstückform kommt es nicht an. Da die Lokalisierung allein noch nicht ausreicht, um das Werkstück prozesssicher zu entnehmen, hilft die kollisionsfreie Greifpunktbestimmung der Software weiter: Mit ihr und der Bahnplanung lassen sich Bauteile auch in schwierigen Positionen automatisiert entnehmen. pb
