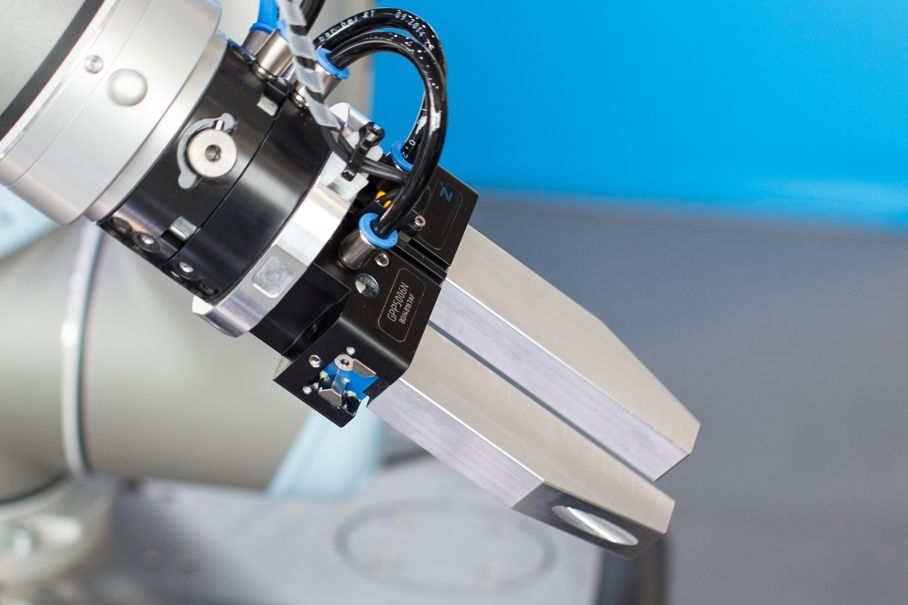
Dieser Parallelgreifer ist zur Veranschauung der Arbeitsweise an einer Station mit UR-Roboter verbaut.